

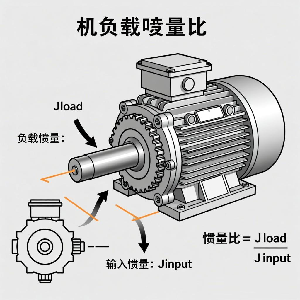
伺服行星减速机在高精度控制中,负载惯量比(负载惯量/电机惯量,通常记为Jr/Jm)对响应速度、过渡响应和稳态误差有决定性影响。比值过大时,电机难以快速带动负载、出现超调与定位滞后。
伺服行星减速机负载惯量比一般超5-10倍,会显著影响伺服系统响应,具体因应用场景、电机及驱动器特性而异:
1.理论依据:负载惯量比过大,电机克服负载惯量阻力困难,影响加减速;还会破坏系统稳定性与响应性平衡,驱动器为稳系统会降响应速度。
2.场景差异:一般工业自动化场景,负载惯量比超8倍,电机响应明显变慢;高精度运动控制场景,超5倍位置误差和响应延迟会被放大。
3.设备特性:高功率、高转矩电机承受负载惯量比能力强;先进驱动器虽能补偿负载惯量变化,但负载惯量比超10倍,响应仍显著下降。
