

变频器与伺服驱动器都能实现电机调速,但实际转速稳定性、控制误差差距明显,很多调试故障根源就是调速精度机制不同。理清变频器和伺服驱动器调速精度差距在哪,能根据转速波动、低速稳定性需求合理选型,避免转速漂移、同步偏差、低速抖动等问题。
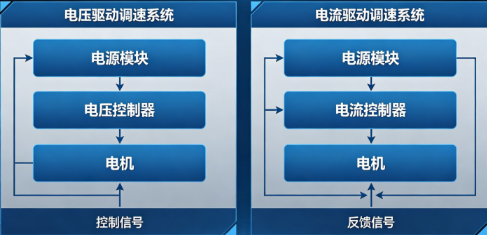
1、控制闭环架构存在本质区别
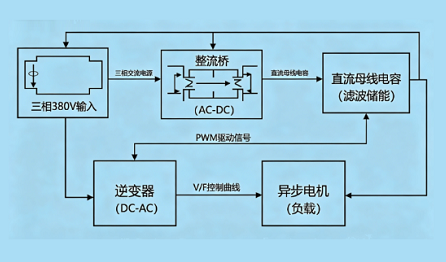
多数变频器采用V/F开环控制,无转速反馈元件,驱动器只按设定频率输出电压,无法实时核对电机实际转速,负载波动、电压波动都会直接造成转速偏移。即便加装编码器做简易闭环,也只有单环速度修正。
伺服驱动器标配位置、速度、电流三环闭环,编码器实时回传转子实际位置转速,毫秒级修正输出力矩,全程抵消转速偏差,这是二者精度最核心差距。
2、转速反馈配置等级不同
普通变频器一般不配编码器,依靠电机自身估算转速,估算值存在固有误差;加装外置编码器也只是低成本改良方案,响应滞后明显。
伺服电机自带高精度光电/磁电编码器,分辨率可达数千乃至上万脉冲,实时采集转角数据,反馈实时性、采样精度远高于变频器改造方案,从硬件层面锁定调速精度上限。
3、低速转矩控制能力差异大
变频器低频区间转矩偏弱,低速易打滑、转速抖动,转差率无法实时补偿,低速转速误差被进一步放大。
伺服依靠电流环实时调控输出转矩,零速即可输出额定扭矩,能抑制负载扰动带来的转速跌落,低速转速平稳性优势突出,高低速精度一致性更强。

4、动态响应修正速度不一样
变频器调节响应慢,负载突变后转速波动恢复时间长,偏差累积明显。
伺服三环调节带宽更高,转速出现微小偏移立刻调整输出电流,抗扰动能力强,加减速过程转速跟随误差极小,动态调速精度拉开明显差距。
5、控制算法精细化程度不同
变频器算法侧重平均转速稳定,侧重经济型通用调速;伺服内置矢量解耦、前馈补偿、滤波抑制算法,专门抑制转速脉动,适配频繁启停、往复运动、多轴同步等高精密工况,进一步缩小稳态与动态转速误差。
